Model Predictive Control (MPC) for Advanced Power Electronic Systems
Many complex topologies of converters with complex filters were introduced in the field of power electronics, which range from diverse multilevel converters to high-order LCL filters, to overcome conventional limitations. These innovations aim to overcome traditional limitations, yet the architecture of control systems has persistently adhered to a similar structure over the years. Most systems simply cascade more control loops to cope with increased complexity, which results in inherent control bandwidth limitations and large energy buffers to fulfill system requirements. Model predictive control (MPC) has been proposed and investigated as a promising alternative for the control of power converter systems, since MPC enables fast dynamic response and handles multivariable systems in a simple and efficient manner by incorporating cascaded control loops in a single loop. Furthermore, MPC allows integrating constraints into the control law so that a conventional system design with a conservative design margin can be avoided and the size of energy buffers can be minimized.
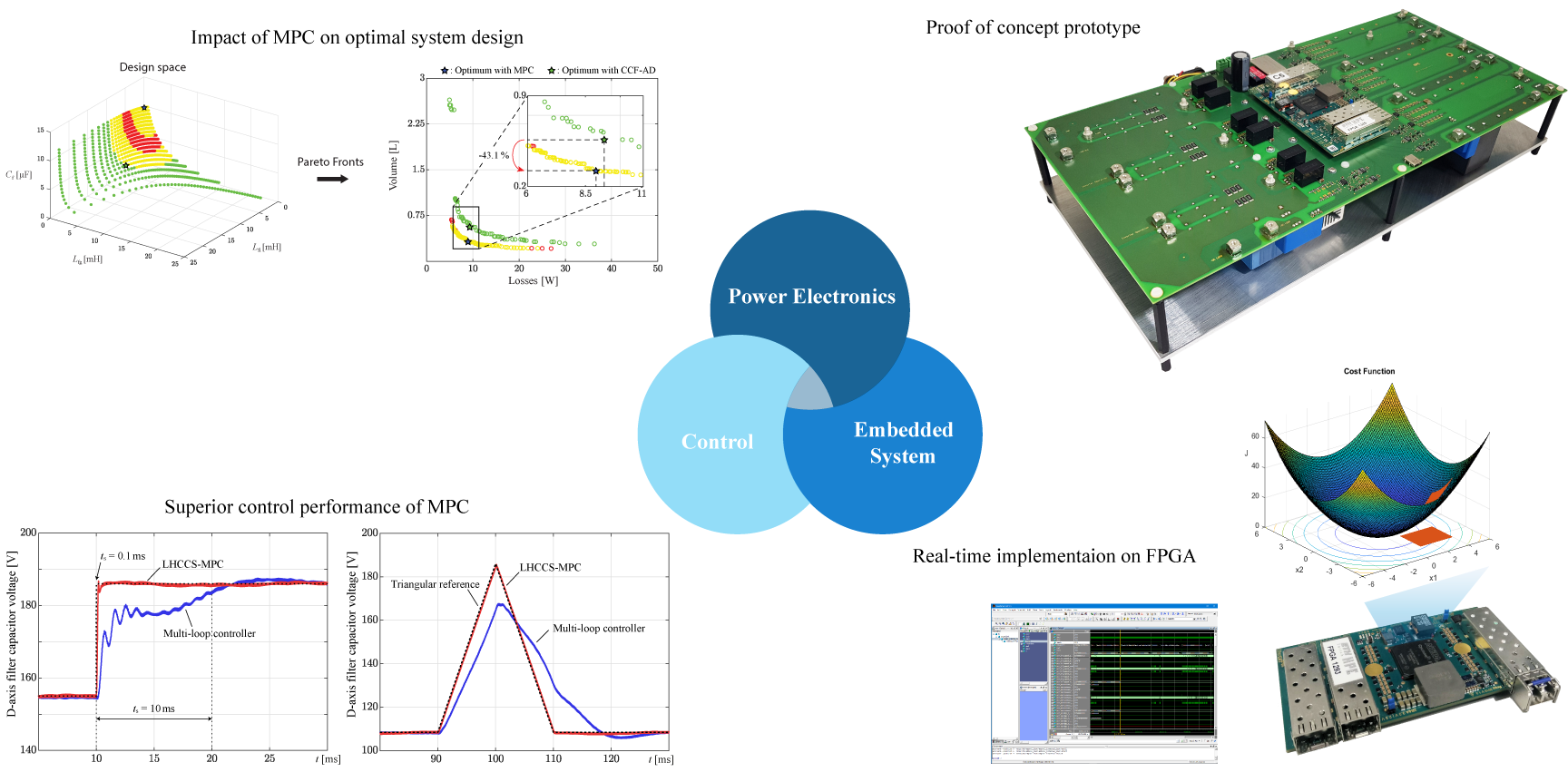
The main objective of this project is to investigate MPC and its impact on the optimal design of power electronic systems. Conventional system design margins and limitations can be diminished or relieved with MPC, and further optimized system design can be achieved. Another key object of the project is to set up an environment for rapid prototyping and embedded real-time implementation of MPC. Even though many MPC methods have been proposed recently for a wide range of power electronic systems, embedded real-time implementations of the MPC methods are still a challenging task as an optimization problem needs to be solved within a very short time interval. The goal is to develop a routine for comparing different approaches, such that newly developed MPC methods can be easily implemented and verified experimentally.